Four-axis robotic manipulator
The advanced and state-of-the-art four-axis robotic manipulator (Ng et al., 2002) has incorporated a tool changer and four tool adopters to permit interchanging tools without stopping the centrifuge. At a centrifugal acceleration of 100g, the robotic manipulator can produce a torque up to ±5 MN·m and prototype loads of ±10 MN, ±10 MN, and 50 MN forces in the x, y, and z directions, respectively.
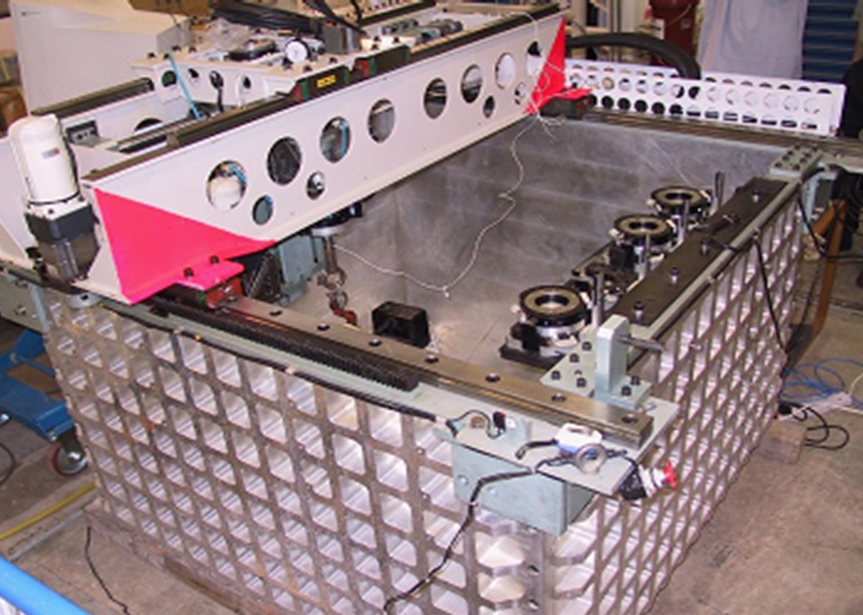
The four-axis robotic manipulator at the HKUST
Conference Paper
- Ng, C. W. W., Van Laak, P. A., Zhang, L. M., Tang, W. H., Zong, G. H., Wang, Z. L., Xu, G. M. & Liu, S. H. (2002). Development of a four-axis robotic manipulator for centrifuge modelling at HKUST. In Proceedings of the International Conference on Physical Modelling in Geotechnics, pp. 71-76. Newfoundland, Canada: Canadian Geotechnical Society.